ロボトラ2015 デザイン賞! いままでのロボトラについて振り返ってみる
9月13日,北海道大学にて開催された「ロボットトライアスロン」に参加してきました.

諸事情により懲りもせず今年も「大人の科学のミニビースト」を改造したマシンで出場しました.
アームも再設計し,ついにコーンを掴むことができる仕様となり,真の意味でトライアスロンができる機体に...なったはずだったんですが...
時間切れで完走できず...orz
でも,なんと結果はデザイン賞!
ポスター賞連覇はなりませんでしたが,賞を頂けて嬉しい限りです.
ロボトラに参加して,デザイン賞の他にもう1つ良かったことがあります.
過去に経験した不満から,今回の大会に出場するにあたっては開発体制の改善に力を入れていたのですが,それが予想以上にうまくいきました!
導入したのは例の「slack+Trello+GitHub」という最近流行りのサービスです.
開発体制については次回の記事に書くこととして,今回はこれまで参加してきた大会について振り返ってみます.
ロボットトライアスロンについて
ロボットトライアスロンは,ライントレース・障害物避け・コーン積みという3種目を自律制御型ロボットで走破するという競技の大会です.
参加者は北海道の学生(主に大学生・大学院生)となっており,北海道のローカルなロボット大会となっています.
詳しいことはロボットトライアスロン公式サイトを御覧ください.
北海道大学ロボットアーキテクトに所属して6年目,5回目の参加でした.(2014年のみ情報科学若手の会に参加してたので出場できず)
1年目,アクリル板切削に目覚める

初出場だった学部1年の時はロボトラが10週年記念ということで「サッポロファクトリー」での開催でした.
電子工作経験ほぼゼロだった自分は,学部3年の先輩の元でアシスタントのような感じで参加しまた.
回路設計からプログラムまで先輩一人でササーと設計・実装して凄かったですね.
自分はマシン筐体のアクリル板をCNCフライス「Black1520」で切削してました.
サークルにCNCのノウハウが乏しく,何度もアクリル板を溶かしたり,エンドミルを折ったりしました^^;
今アクリルをサクサク切削できるのは,ここで沢山の失敗があったからかもしれません.
2年目,初のテオ・ヤンセンリンク型マシンで出場.敗因は輪ゴム駆動
ArQuinoBeest
2011年に発売された「大人の科学マガジン Vol30 テオ・ヤンセンのミニビースト」を見て一目惚れ.
 |
大人の科学マガジン Vol.30 (テオ・ヤンセンのミニビースト) (Gakken Mook) 新品価格 |
![]()
本の中にはミニビーストをモーターで動かしている作例もあり,テオ・ヤンセン機構でロボトラを歩いて走破したい!というが事の始まりでした.
CNCで回路基板を切削し,そこにAVRを載せてArduinoでプログラムを書いていたので,名前は「Arduino」と「歩く」をかけて「ArQuino(あるくいーの) Beest」とか言う名前を付けてみたり.
Arduinoはソースを書きやすいこともあって,チームメンバーだった理学部の同期にほぼ丸投げして自分はハードウェア作製に専念.
お互いに干渉する部分はあまりなく,どちらかの作業がクリティカルパスになるようなこともなかったので開発は可もなく不可もなくという感じでした.
ただ,ハードウェアの設計が致命的で,タミヤの透明なギヤボックスの先にプーリーを付けて,輪ゴムで駆動していたのが最大の失敗でした.
モーターを動かすと輪ゴムが絡まって全然動けない状態になることがしばしば...
(チェーン駆動も考えたのですが設計と部品の入手性から断念)
輪ゴムとプーリー
当然,競技中も輪ゴムが絡まってメンテナンスしてたら時間切れ.
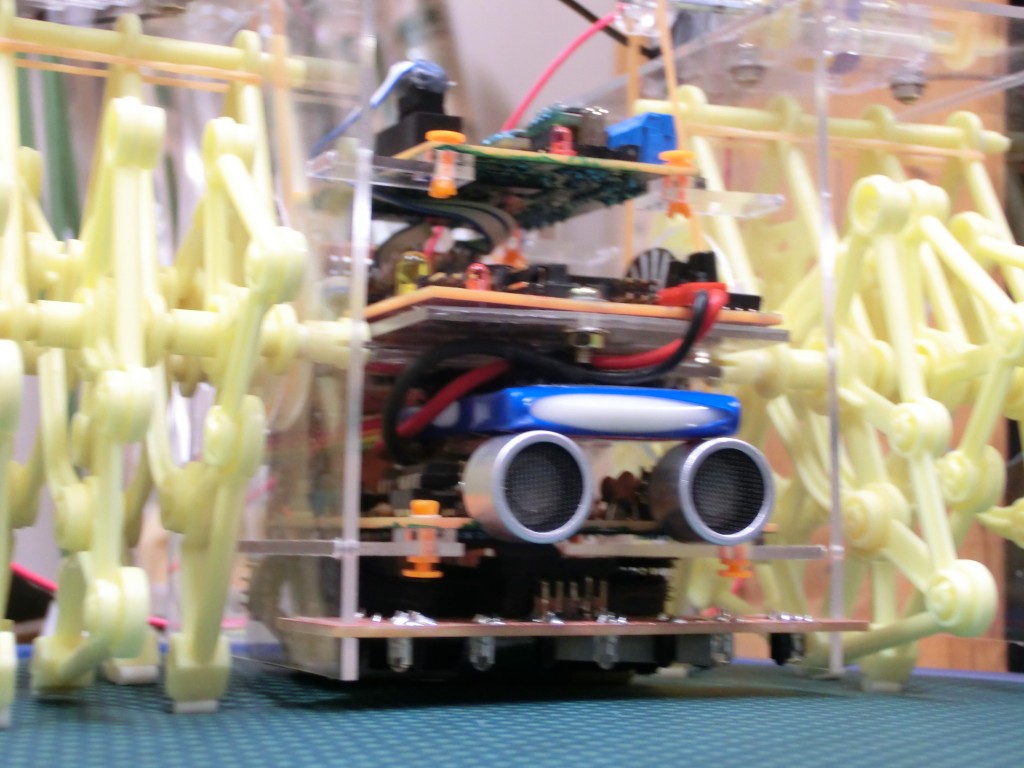
3年目,ミニビーストでのリベンジ,Kit Mill RD300を導入して自作ギヤ駆動に
この年,サークルにKitMillが導入され,ギヤが作れることが判明.
これはもうリベンジするしかないじゃないですか.
というわけでギヤ化したマシン「ArQuino Beest G」で出場.
AVRを20MHzで動かすため,Arduinoを辞めてC言語で実装することに変更しました.そしてソースコードがカオスに.
諸モジュール,回路パターン設計・作製,ポスターはチームメンバーに作ってもらいましたが,回路設計,ハード設計,そしてソフト実装も自分でやることになってキャパシティオーバー.
アームが完成したのが大会当日の朝という悲惨な状況.
明らかに開発時間不足でした.
それでも,走りは随分進歩したもので,完走目前でタイムアップという記録.
走りの結果は残念でしたが,ポスター賞をいただきました.

4年目,大会ルールが変更.実はコーンを掴めない
懲りず,Beestで出場(笑)
(出場を決めるのがギリギリすぎてハード設計する時間が無かっただけ.)
実はこの年,大会ルールの大幅変更がありました.
トライアスロンの中の1競技が,スチール缶を運ぶという競技からコーンを積むという競技になってしまい,アームの設計変更を強いられました.
急遽,チームメンバーに設計してもらったのですが,作ってみたらコーンが掴めないw
単にリテイクが許されない開発時間不足が元凶
そんな中,自分はソフトウェアのアップデート作業に専念.
そしてついに,大会では時間内にゴールすることが出来ました.
(トライアスロンじゃなくてバイアスロン状態でしたが)
完走したといっても競技タイムの成績は良くないんですが,ポスター賞をいただきました.
2連覇です.いつもハイクオリティなポスターを作ってくれるチームメンバーに感謝感謝.

5年目,出場できず
情報科学若手の会に参加するため,静岡に行ってましたw
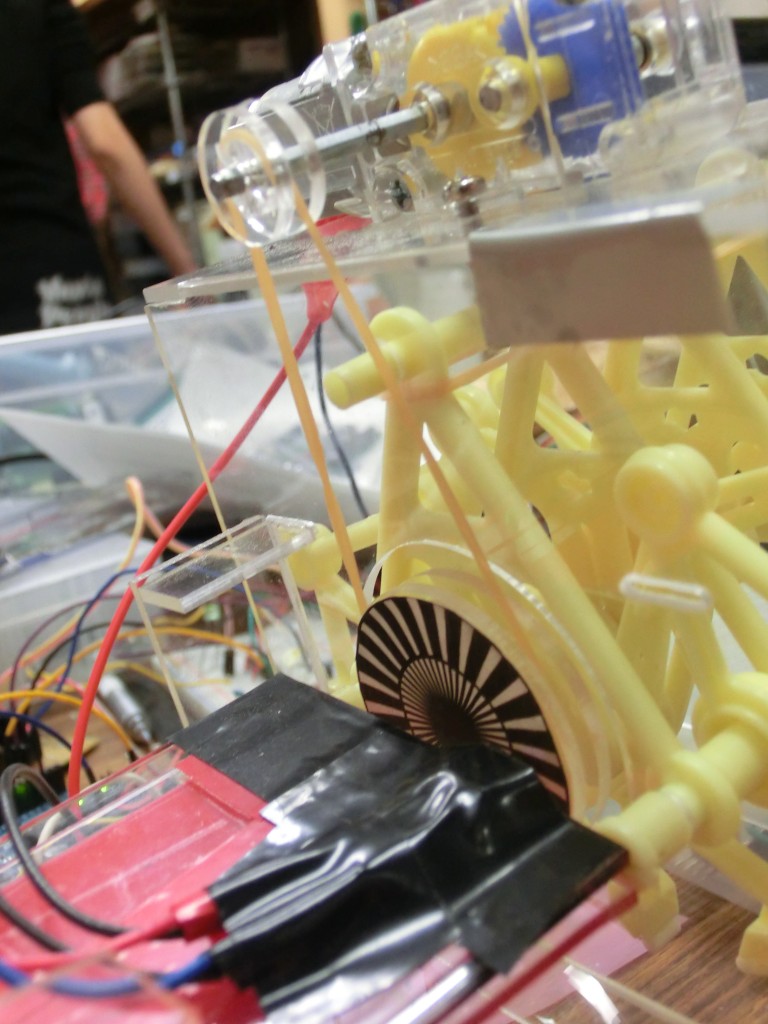
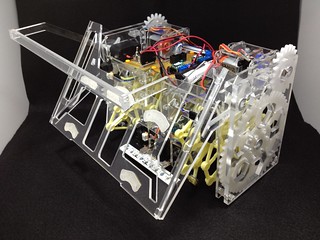
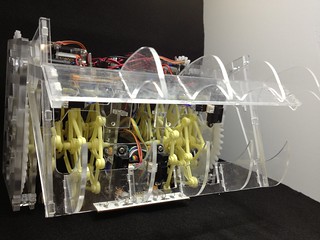
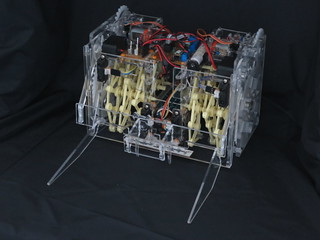
6年目,真のトライアスロンへの挑戦.チーム開発にも力を入れる
そんな過去があっての,今年です.
完走は果たしたので次こそアームでしょうということでHandの頭文字をとって「ArQuino Beest H」
出場を決めたのは「参加応募締切当日」
いつも開発時間不足なのに,何も学んでませんねw
まぁ修士課程2年ですし仕方がない(?)
とにかく時間が無く,少しでも効率的にチーム開発をする必要がありました.
チームメンバーも学部4年いじょうで,研究室で皆忙しい.
そこでツールの導入というわけです(これについて詳しくは次回の記事で).
アーム設計担当・アーム作製担当・ソフトウェア担当・ポスター担当という感じで分担して作業を進めました.
連絡も密に取ることができ,いままで参加してきた中で,最も連携が取れていたと思います.
実際,アームも一発勝負ではなく,一度再設計できましたし.

その代償といいますか,GitHubで管理するためソフトウェアを完全に書き直した結果,調整時間不足となってしまいました.
結局,最後は徹夜状態w
マシンも4年目でハードのガタもきていたのか,最後までうまく調整できませんでした.
大会結果は完走できずタイムアップ.
過去の成績から,乾燥できるポテンシャルはあると思うんですけどね.残念.
アピール走行でコーンを積む姿を魅せることが出来たことが成果,といったところでしょうか.
成績は相変わらず残念でしたが,デザイン賞頂けました.(ポスター賞連覇ではありまでした^^;)

総括
1年目でアクリル板加工技術を身に着けたことによる,アクリルへのこだわり.
テオ・ヤンセン機構に一目惚れしてから,ミニビーストを改造したマシンを使うことへのこだわり.
ロボトラではこの2つだけは貫いてきました.
ただの時間不足で選択しがコレしかなかった
このこだわりを貫けたことは,何一つ後悔はありません.
良かったと思ってます.
年々チームメンバーは変わったりもしましたが,個人的な理由で作りたいと思っているマシンを作ることに協力してくれたメンバーには感謝の言葉しかありません.
メンバーのおかげでポスター賞を2回ももらいましたし,最後はトライアスロンできる形態にまで到達しました.
もしかしたら,チームメンバーはメンバーでそれぞれ思い描いていたマシンがあったのではないか,
もしかしたら,勝てるマシンを作りたかったんじゃないか,そう思うと頭があがりません.
後悔はありませんが,技術の観点で言えば不合格だった思います.
仕様を自分しか把握していない(自分さえ把握していない)というドキュメント不足,
タイヤじゃないから振動が酷いのは仕方ないとはいえ,その程度もリカバーできない設計不備,
そして何より4年間以上もあったのに,大会間近に動き始めるという準備不足.
そんな後悔を後輩に伝えることぐらいしか,もうできることはないという立場になってしまいました.
(´Д`)ハァ…
徹夜も何回もありましたが,なんだかんだ楽しかったので卒業しても(できれば誰かと)プロジェクト組んで開発してたいなーと思う今日此の頃でした.
タグ: AVR, イベント, サークル, ロボットトライアスロン
コメントを残す