Robot
所属サークル「ロボットアーキテクト」という名の通り,大会用にロボットも作ったりします.
ところで,ロボットってなんでしょう?
ヒューマノイド?自立型?ロボット≠ラジコン?車は?家電は?ガンダムは?(モビルスール?w)
「工学の集大成」と考える人もいました.
何をもってロボットと呼ぶべきか,実はかなり曖昧な存在です.ここでは,自分がロボットだと思う制作物を紹介していきます.
ロボットトライアスロン
北海道の大学生が参加するローカルなロボコン.
ライントレース・障害物回避・オブジェクト運搬の3種目(=トライアスロン)を無操縦自立型ロボットが行う.
2013年度:ArQuino Beest G3
ArQuinoBeest G3
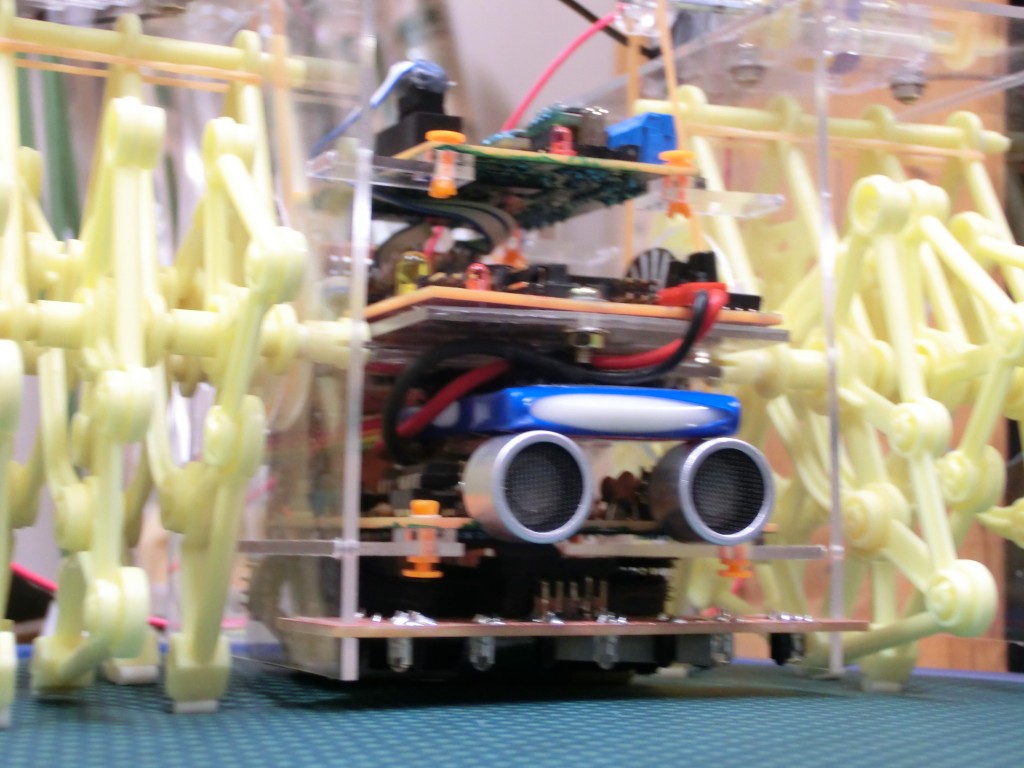
ロボットトライアスロン2013用マシン制御プログラムを改善し,3年目にしてヤンセンリンク機構マシンで初の完走を果たした.
【成績】完走・ポスター賞受賞
ORIGINALMINDのものづくり文化祭にも投稿しました(動画).
2012年度:ArQuino Beest G

ArQuinoBeest G
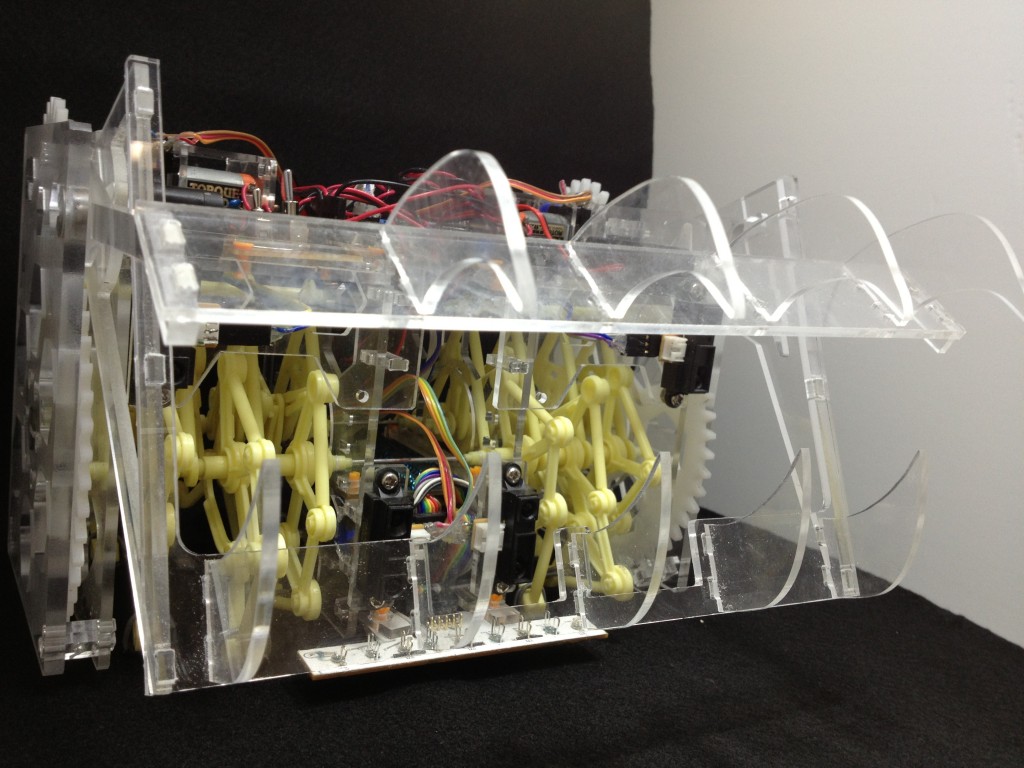
ロボットトライアスロン2012用マシンモーターとリンク機構の伝達をギヤにすることで,制御性と移動性能が格段に向上した.
Arduinoによる制御ではなくなったが,改造版ということと,ギヤの頭文字をとって「ArQuino Beest G」
【成績】ゴール手前でタイムアップ・ポスター賞受賞
2012年度:ArQuino Beest
ArQuinoBeest
ロボットトライアスロン2011用マシン他のチームがタイヤ移動マシンを採用する中,ヤンセンリンク機構(大人の科学の付録)を用いた移動で,大会では異彩を放った(と思う).
Arduinoで制御していたので,「Arduino」と「歩く」をかけて,「ArQuino」と名づけた.
案の定,タイヤに比べて不安定・遅い.フィードバックの不完全さやプーリーベルト(輪ゴム)が絡まるなど様々な問題を抱えていた.
【成績】コース半分手前でタイムアップ
2011年度:カサイホウチ機

カサイホウチ機
ロボットトライアスロン2011用マシン当初大学1年だった自分と,3年の先輩で作ったマシン.
自分は外装のアクリル加工を担当,先輩は中の回路と制御プログラムを担当.
運悪くこの年の会場の床は凹凸のあるブロックで,ステッピングモータの脱調が多発してしまう.それでも,何とか完走.
【成績】完走
その他
wood strand beest
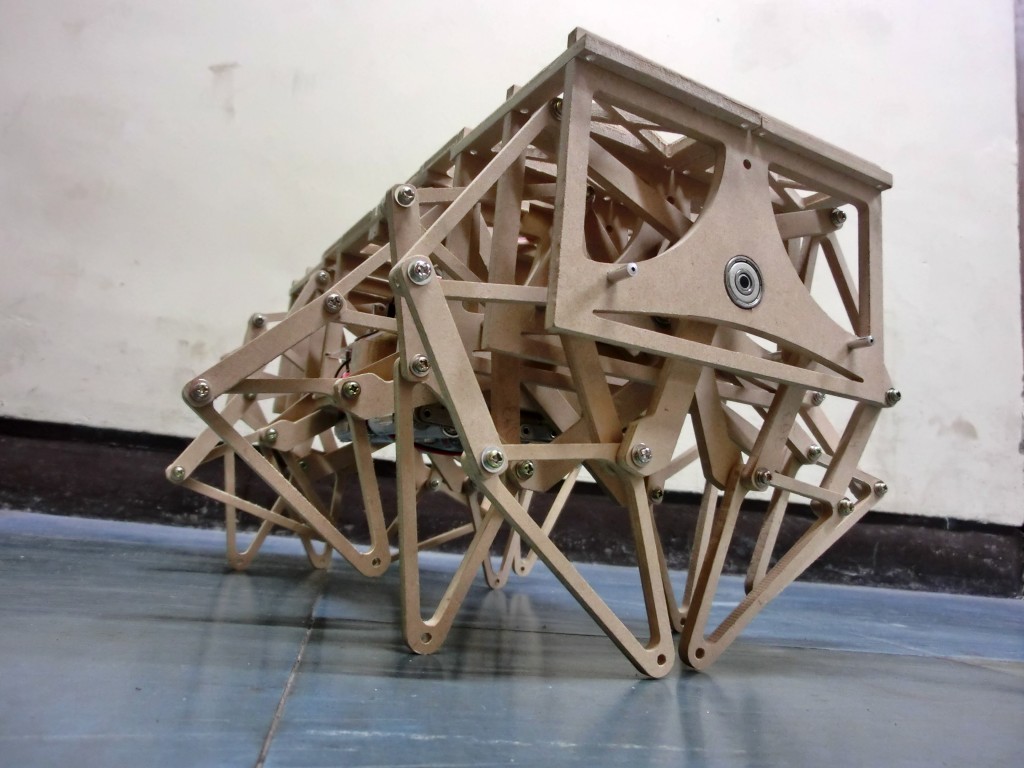
木製ストランドビースト
オランダのテオ・ヤンセン氏が考案したリンク機構を真似て作った木製のロボット(?).公開されているリンク比をもとに,1からCADで設計図を作り,CNCにフライスでMDFを加工して作成した.後に,サークル外部のソフトウェアに強い方が制御を担当.
最近のコメント