Overview
アクリルボディ、POMギヤ、ミニ・ビースト由来の脚機構を組み合わせた歩行ロボットです。
AVR ATmega328P、XBee、赤外線距離センサー、サーボを搭載し、ライン走行・障害物回避・缶運搬を狙って設計しました。
Highlights
- KitMill RD300でギヤやアクリルパーツを切削
- PID調整用の可変抵抗など、調整しながら走らせるための電装を搭載
- 2012年度ロボットトライアスロン向けに制作
Robot
テオ・ヤンセン機構で歩くロボットトライアスロン向けロボット。
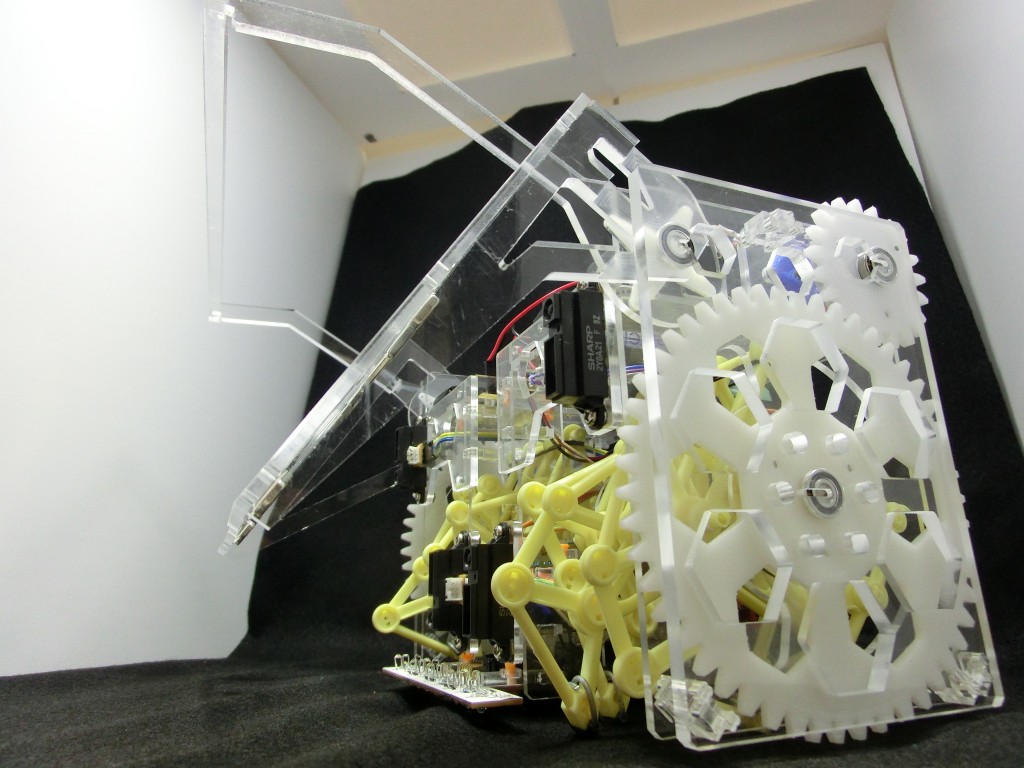
アクリルボディ、POMギヤ、ミニ・ビースト由来の脚機構を組み合わせた歩行ロボットです。
AVR ATmega328P、XBee、赤外線距離センサー、サーボを搭載し、ライン走行・障害物回避・缶運搬を狙って設計しました。